Grab "This action is very important for many robots. The robot wants to perform some specific actions, and it is inseparable from the grasping operation of the robot arm. However, the usual mechanical claws are made of metal, they are operating. The process may damage some relatively vulnerable items and even harm humans.

According to foreign media reports, an engineering team at the University of California, San Diego recently created a flexible robotic gripper that "feels" the shape of an object. It can build a virtual 3D model of the object by touching them and then continue to operate the items accordingly. Often, robots need to see what they are grabbing through the camera, or they need to be trained to grab the object. This means that it can be challenging in low light conditions.
The new robot gripper is different because it can be touched to determine the three-dimensional shape of an unfamiliar object. It uses three pneumatic fingers, each of which is covered by a sensing "skin" consisting of a flexible silicone with embedded carbon nanotubes.
When one of the fingers comes into contact with the surface of an object, the air pressure inside the finger increases at that position. The increase in pressure causes a change in the conductivity of the nanotubes in this region. When the robot gripper "feels" into the shape of the object, a series of electrical signals are transmitted from the finger to the control panel that creates the virtual 3D model.
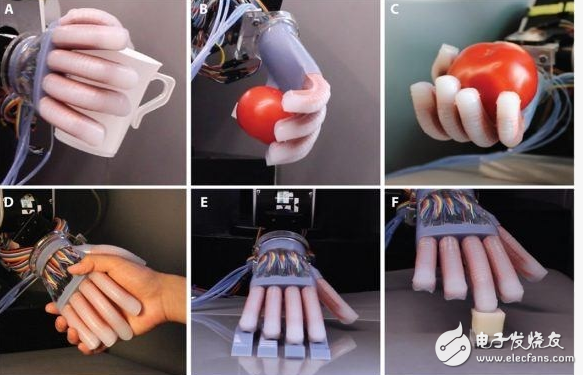
Once the robot gripper has established the overall shape of the item, it can grab and manipulate it. The robotic gripper can even perform a torsional motion by selectively inflating one or more "air chambers" within each finger - which allows it to tighten the bulb and the like.
Spinner Rotary Joint,Fiber Optic Rotary Joint,Rotary Union,Coaxial Rotary Joint
Dongguan Oubaibo Technology Co., Ltd. , https://www.sliprobs.com