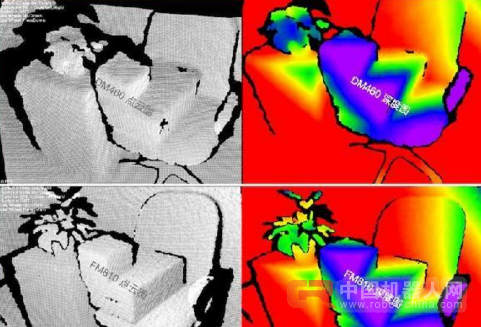
 As robots have begun to enter the factories, warehouses, hotels, shopping malls, restaurants and other environments , we are paying more and more attention to the robot's mobile capabilities, so that "obstacle avoidance" is a topic we can't go around. Obstacle avoidance and SLAM are two different functions that are both related and different. Although SLAM has performed obstacle detection in the surrounding environment through one or more sensors in the process of building a map, it is limited by the current mainstream SLAM technology. Immature, obstacle avoidance problems can not be a good solution. Most of the common robots in the market use two-dimensional laser radar to navigate, but two-dimensional laser radar still has shortcomings in practical applications. As shown in the figure, the two-dimensional laser radar is a distance measurement with a 360-degree horizontal field of view angle. Most of the obstacles in the range can be measured due to the reflection of the laser, but the lidar can only detect the objects of A and C. If it exists, it cannot detect the B object under the radar scanning plane. If the A and C objects have different shapes above and below, the robot cannot scan the data of the obstacle distance to achieve accurate obstacle avoidance. Therefore, in practical applications, objects scattered on the ground, raised steps, tables, and chairs all pose challenges to Lidar's obstacle avoidance. If we consider this kind of obstacle detection that needs to consider the complete outline of the object, we call it “stereo obstacle avoidanceâ€. In some complex places, two-dimensional laser radar cannot perform the task of obstacle avoidance in three dimensions, and robots must be equipped with other sensors as supplements. For example: Ultrasonic sensor, its cost is very low, the implementation is simple, can identify transparent objects, the disadvantage is that the detection distance is close, the accuracy of the three-dimensional contour recognition is not good, so the recognition of complex contour objects such as table legs is not good, but it can identify the glass , mirrors and other objects. There is also a depth camera, which has a three-dimensional distance measurement capability (having both horizontal and vertical field angles), so it can directly detect three-dimensional obstacles and provide three-dimensional protection capabilities for mobile robots. Therefore, in high-matching mobile robots, laser radar can be used to implement SLAM, depth cameras can be used to achieve obstacle avoidance, and ultrasonic waves can be used to protect blind spots detected by laser radar and depth cameras. These three types of sensors have become common in many high-end mobile robots. Combination configuration. Xu Wei, deputy general manager of Shanghai Tuoyu Information Technology Co., Ltd. (abbreviation: Shanghai Tuoyu) said: "The vertical field angle of most of the depth cameras is below 60 degrees. When the head-up camera is installed, the detection of the frontal obstacle avoidance is better, but There is a large blind area for low obstacles at close range." "As shown in the figure, one way is to reduce the installation height. Another option is to use a top-down installation angle, but this will result in the lack of detection of obstacle height." Therefore, careful consideration and consideration are required in practical use. If you want to design the camera for installation, if the requirements for the detection of upper and lower obstacles are relatively high, you can use a combination of head-up + two depth-view cameras. The following are the more important depth camera specification parameters provided by Shanghai Tuoyu for reference by the industry: All cameras have their shortest and longest working distances. Typical depth camera working range is 0.3-3m (close range version) or 0.5. - 5m (medium distance version), the depth camera will not see the object at the shortest distance. This may pose a threat to the protection of the robot's body and needs careful consideration. In addition, the higher the resolution, the better the contour recognition of the object, but the cost and the computational cost will be greater. For the simple obstacle avoidance, in fact, the detailed recognition of the object contour is not required, and the resolution may not be high. High, such as 480p level can be. Finally, the detection frame rate requirement of the depth camera is related to the robot's movement speed. Usually the speed of ordinary commercial or home robots is not fast, mostly at about 1m/s, the frame rate of 30fps, and the frame delay is low. , can already meet the requirements.
As robots have begun to enter the factories, warehouses, hotels, shopping malls, restaurants and other environments , we are paying more and more attention to the robot's mobile capabilities, so that "obstacle avoidance" is a topic we can't go around. Obstacle avoidance and SLAM are two different functions that are both related and different. Although SLAM has performed obstacle detection in the surrounding environment through one or more sensors in the process of building a map, it is limited by the current mainstream SLAM technology. Immature, obstacle avoidance problems can not be a good solution. Most of the common robots in the market use two-dimensional laser radar to navigate, but two-dimensional laser radar still has shortcomings in practical applications. As shown in the figure, the two-dimensional laser radar is a distance measurement with a 360-degree horizontal field of view angle. Most of the obstacles in the range can be measured due to the reflection of the laser, but the lidar can only detect the objects of A and C. If it exists, it cannot detect the B object under the radar scanning plane. If the A and C objects have different shapes above and below, the robot cannot scan the data of the obstacle distance to achieve accurate obstacle avoidance. Therefore, in practical applications, objects scattered on the ground, raised steps, tables, and chairs all pose challenges to Lidar's obstacle avoidance. If we consider this kind of obstacle detection that needs to consider the complete outline of the object, we call it “stereo obstacle avoidanceâ€. In some complex places, two-dimensional laser radar cannot perform the task of obstacle avoidance in three dimensions, and robots must be equipped with other sensors as supplements. For example: Ultrasonic sensor, its cost is very low, the implementation is simple, can identify transparent objects, the disadvantage is that the detection distance is close, the accuracy of the three-dimensional contour recognition is not good, so the recognition of complex contour objects such as table legs is not good, but it can identify the glass , mirrors and other objects. There is also a depth camera, which has a three-dimensional distance measurement capability (having both horizontal and vertical field angles), so it can directly detect three-dimensional obstacles and provide three-dimensional protection capabilities for mobile robots. Therefore, in high-matching mobile robots, laser radar can be used to implement SLAM, depth cameras can be used to achieve obstacle avoidance, and ultrasonic waves can be used to protect blind spots detected by laser radar and depth cameras. These three types of sensors have become common in many high-end mobile robots. Combination configuration. Xu Wei, deputy general manager of Shanghai Tuoyu Information Technology Co., Ltd. (abbreviation: Shanghai Tuoyu) said: "The vertical field angle of most of the depth cameras is below 60 degrees. When the head-up camera is installed, the detection of the frontal obstacle avoidance is better, but There is a large blind area for low obstacles at close range." "As shown in the figure, one way is to reduce the installation height. Another option is to use a top-down installation angle, but this will result in the lack of detection of obstacle height." Therefore, careful consideration and consideration are required in practical use. If you want to design the camera for installation, if the requirements for the detection of upper and lower obstacles are relatively high, you can use a combination of head-up + two depth-view cameras. The following are the more important depth camera specification parameters provided by Shanghai Tuoyu for reference by the industry: All cameras have their shortest and longest working distances. Typical depth camera working range is 0.3-3m (close range version) or 0.5. - 5m (medium distance version), the depth camera will not see the object at the shortest distance. This may pose a threat to the protection of the robot's body and needs careful consideration. In addition, the higher the resolution, the better the contour recognition of the object, but the cost and the computational cost will be greater. For the simple obstacle avoidance, in fact, the detailed recognition of the object contour is not required, and the resolution may not be high. High, such as 480p level can be. Finally, the detection frame rate requirement of the depth camera is related to the robot's movement speed. Usually the speed of ordinary commercial or home robots is not fast, mostly at about 1m/s, the frame rate of 30fps, and the frame delay is low. , can already meet the requirements.
Neck bluetooth headset - a bluetooth headset with headphone cables or accessories running from the neck to the ear when wearing. It is a product developed in recent years.
Born: in order to solve the boring when running or control the exercise rhythm, many people choose to listen to music,however, experienced people all know that because of the swing in the process of exercise, the earphones are easy to fall off, which makes it difficult to run coherently and constantly ,under this circumstance, the bluetooth neckband headphones was designed.
Features:
1: There is no restrained from headphone cables.
2: In line with the development trend of headphones: From the perspective of the development trend of consumer headphones, bluetooth neckband headphones should be regarded as the general trend. Whether it is sports headset or head-worn headset, many manufacturers are vigorously developing bluetooth headset to occupy the market.
3: Not affected by audio interface
More and more flagship mobile phones are also trying to cancel the audio interface, which is the important reason for the generation of bluetooth neckband headset. As long as the device that supports bluetooth music play is ok, the audio interface will not be considered.
4: No burden when running
Sports neck hanging bluetooth headset is light and easy to wear, more convenient and fast storage, no knot, more relaxed entertainment sports, let you run zero burden.
5: Waterproof and sweat-proof are very important
When exercising, people will sweat a lot, which may cause some damage to the ears. The bluetooth neckband headphones adopts the IPX5 waterproof design, which is more suitable for sports scenes. Especially in summer, when sweat is easy to happen, it is necessary to use the bluetooth neckband headphones.

Wireless Headphone,Bluetooth Headphones Wireless,Bluetooth Headphone Neckband,Neckband Bluetooth Headphones
Shenzhen Linx Technology Co., Ltd. , https://www.linxheadphone.com