Lei Feng network (search "Lei Feng network" public concern) : Author of this article Evan Ackerman, source spectrum, compiled by Lei Feng network exclusive, refused to reprint without permission!
 Most legged robots are very recognizable because we all know what a leg looks like. Legs of humans, legs of mammals, legs of birds... It is interesting that some robots have leg designs that are not common in nature. For example, RHex has six elastic and rotatable legs, which can help it complete the dazzling process. Acrobatics.
Most legged robots are very recognizable because we all know what a leg looks like. Legs of humans, legs of mammals, legs of birds... It is interesting that some robots have leg designs that are not common in nature. For example, RHex has six elastic and rotatable legs, which can help it complete the dazzling process. Acrobatics.
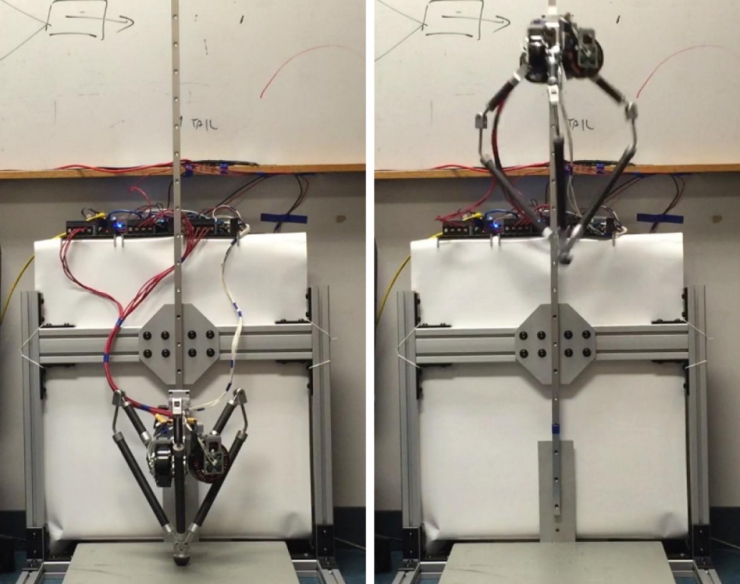
Simon Kalouche of Carnegie Mellon University just completed his master's thesis. In the paper, he described a brand-new design - "a pair of legs that can walk and run agilely. The most important thing is that it has all-round jumping ability and at the same time it can land in an agile manner."
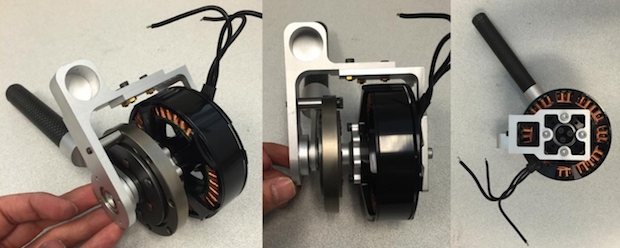
Kalouche invented the "goat leg" is a "gear-free all-round accelerated orientation topology." This design has little to do with the physical construction of the goat's leg, but the goats who are still capable of running on the cliffs are indeed a direct source of inspiration for Kalouche. Kalouche focused on making the legs more like a goat's leg, rather than copying directly from a biological point of view. Eventually he invented a novel and dynamic parallel system controlled by a triple-engine.
Most legged robots can move dynamically, with some exceptions. Humanoid robots are particularly bad at running and jumping. Until recently, four-legged robots have begun to show some basic mobile skills that humans are accustomed to. Even so, these robots are not really good at crossing places on the planet where 50% of rail traffic can't reach human legs. The scenes that "goat leg" tries to get involved with include:
1. There are many legged robots in highly unstructured environments where wheeled vehicles cannot pass;
2. In the ground level environment, breakthrough large and steep obstacles (associated with the height of the robot) hinder walking (for them, there are limits to the angle of the terrain that can be walked, and for humans this limit is about 45 degrees) ;
3. Pits, holes, ditch and holes will also hinder walking;
4. In a tight space, turning or repositioning, and then walking or jumping are difficult;
5. Perform long-distance tasks between different terrains. Different gait or movement forms will increase the mobility, efficiency, and life of the robot itself.
An important factor that distinguishes the “goat leg†from other mechanical legs is that it is not limited to planar motion, which makes it easier to move in different directions without repositioning. The "goat leg" has strong mechanical power and strong virtual compatibility (thanks to an adjustable full-resistance controller). It also has three butt-rise electric motors that provide high-energy distributed metal collars while maintaining leg strength. Its own low inertia. 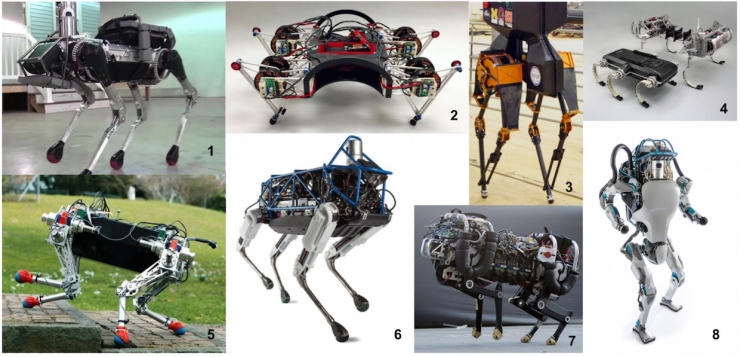 Some people try to compare "goat leg" and other designs, such as the electric four-legged Cheetah designed by MIT (the other advanced robots appearing in the Kalouche dissertation have been shown in the figure above). It's like comparing a real goat to a real cheetah: a goat won't win, but at least it has a certain degree of competitiveness, but the cheetah will completely lose its right to speak under the precipitous terrain of goats. Kalouche concluded: “On the straight, the 'goat leg' may never run faster than the cheetah of MIT. The 'goat leg' design allows it to lose the maximum speed in one-dimensional space. At present, in the full 3D space Its run and jump is more agile than other legged robots including the MIT Cheetah."
Some people try to compare "goat leg" and other designs, such as the electric four-legged Cheetah designed by MIT (the other advanced robots appearing in the Kalouche dissertation have been shown in the figure above). It's like comparing a real goat to a real cheetah: a goat won't win, but at least it has a certain degree of competitiveness, but the cheetah will completely lose its right to speak under the precipitous terrain of goats. Kalouche concluded: “On the straight, the 'goat leg' may never run faster than the cheetah of MIT. The 'goat leg' design allows it to lose the maximum speed in one-dimensional space. At present, in the full 3D space Its run and jump is more agile than other legged robots including the MIT Cheetah."

After comparing and analyzing today's legged robots, you will surely find that there is only one “goat leg†that cannot support standing. At present, Kalouche is still testing the hardware. His next step is to install custom electronics, motor controllers, and power systems carried by robots. He plans to push the mechanical legs from the testing phase to unlimited 3D space. In addition, Kalouche plans to integrate "goat leg" with other robot forms, including single-legged, two-legged, three-legged and four-legged.
Via spectrum
The DC Source System has high power density, short response time, high accuracy and full protection. The programmable power supply has been widely adopted in production line, burn-in test, laboratories and integrated system etc. With various communication interfaces, apm DC Power Supply can be remote controlled from computer.
Some features as below:
- With accurate voltage and current measurement capability.
- Coded Knob, multifunctional keyboard.
- Standard RS232/RS485/USB/LAN communication interfaces, GPIB is optional.
- Remote sensing line voltage drop compensation.
- Equips with LIST waveform editing function.
- Use the Standard Commands for Programmable Instrumentation(SCPI) communication protocol.
- Have obtained CE certification.
120V DC Source System,Industrial Power Supply,DC Solar Small Power System,Dc Power Source For Lab Test
APM Technologies Ltd , https://www.apmpowersupply.com