The humanoid robot system created by MIT can not only operate in a dangerous environment, but also can carry a heavy task. The most important influence of this design is the wearable exoskeleton designed by Dong Jin Hyun, a researcher of Hyundai Motor Company.
The annual International Consumer Electronics Show (CES) was held in Las Vegas, USA in early January. Among the many consumer electronic devices on display, the author prefers to find some important influences on the world. Electronic technology; on the first day of CES, the first thing I noticed was the wearable roboTIc exoskeleton from Hyundai Motor Company, which was explained by Dong Jin Hyun, a senior researcher at the company.
The development of wearable exoskeleton robot technology began at the Massachusetts Institute of Technology (MIT) "highly efficient roboTIc mechanisms and electromechanical system (HERMES)" and is the MIT Biomime Robotics Laboratory (BiomimeTIc RoboTIcs Lab). The research project of the company; the laboratory put forward a concept, proceeded to design, and finally created a prototype of a humanoid robot that can be remotely controlled.
The humanoid robot system created by MIT can not only operate in a dangerous environment, but also can carry heavy tasks. The most important influence of this design is the wearable exoskeleton designed by Dong Jin Hyun.
Let HERMES and humanoid robots balanceDesign engineers have been trying to get the robot's motion to its limits—that is, to make the robot's dynamic behavior behave like humans. As human beings, we can adapt to unusual and unexpected situations through brain thinking, so that we can be very creative in problem solving; by deploying some form of artificial intelligence and motor skills on robots, It may allow the robot to enter a highly dangerous and potentially fatal environment to perform tasks to ensure the safety of the field workers.
By using the divergent component of motion (DCM), operators and robots can achieve balance synchronization through the center of mass (CoM) and the center of pressure (CoP); we humans can Coordinating complex movements through several joints and synchronizing the smoothness and smoothness of the movements, the researchers also hope to create a robot that can completely mimic the smooth movement of humans.
One of the ways to achieve the above goals is to capture and imitate human movements through a whole-body teleoperation.

The robot system HERMES developed by MIT is a humanoid robot design that can perform complex dynamic operation tasks. (Source: Reference data 1)
The remote robot operator needs to be able to integrate with the robot's body and senses, which means that the robot's power and interference can be felt, and thus the robot can be guided to perform the task successfully, just as the operator himself is on site. MEMS sensors should play an important role in this design, and accelerometers and gyroscopes are now effectively used for the operation and sensing of such humanoid robot systems.
Inertial measurement unit (IMU) and sensor hub enable precise control, automation and positioning of the robot; such as ADI's EVAL-ADIS2 evaluation system can help speed time to market, Bosch Sensortec can also be used with its smart hub (Smart Hubs) ) and excellent sensor hub software for dedicated sensor nodes (ASSN).
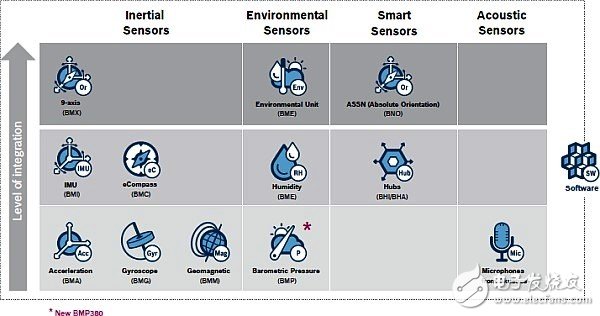
Bosch Sensortec's lineup of MEMS sensor solutions is strong. (Source: Bosch Sensortec)
Customized IMU design keeps the robot stableSpeaking of the IMU, it seems to have nothing to do with the HERMES humanoid robot, but the customized IMU allows the design engineer to maintain the stability of the robot with a natural unstable motion profile; for example, the customized IMU designed for Ballbot can do this A robot that is not able to "stand up" with its original shape provides the precision needed to maintain stability.
Calibrating the ADC before calibrating the IMU helps simplify the calibration of the IMU and requires only a simple device; the Kalman filter is the key to data fusion and accurate angle estimation output, and allows the robot to be perfectly balanced. . The Kalman filter also removes gyroscope signal drift and motion-accelerated noise that can cause the accelerometer to fail.
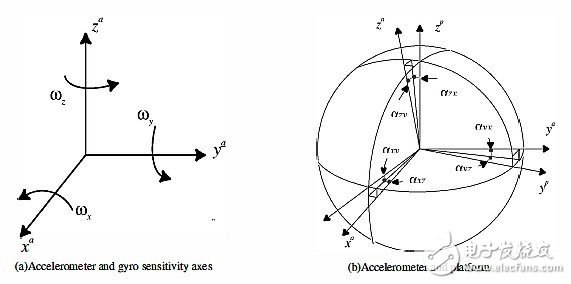
The {xa, ya} two axes represent the accelerometer sensitivity, coupled to the gyroscope, and measure the angular velocity of the axis around the accelerometer. (Source: Reference Data 2)
Kalman filter
Kalman filters filter noise, produce a non-observable state, and predict future states; filtering noise is important because many sensors have too much output noise and cannot be used directly; Kalman filters allow design engineers To calculate an indeterminate signal/state, an important application is to generate the unobservable state required to estimate the speed.
Usually there are position sensors (encoders) on different joints of the robot, but simply distinguishing the position to obtain the speed will cause noise; Kalman filter can be used to estimate the speed, another good function can be used Predicting future states is useful when the time delay of sensor feedback is particularly large, and time delays can cause instability in the motor control system.
Control Architecture Design of HERMES SystemHuman operators will need a seamless virtual telepresence to allow robots to perform difficult tasks in a dangerous environment that could only be done by human dexterity and smart brains; and it is vital that the entire feedback The power and delay of the loop must be closely managed by the humanoid robot.
When we exercise training, we must first understand the basic principles of generating an action; in this case, the reflection of human proprioception is the aggregation between the muscles, joints and neuromuscular systems that allow the body to function properly. It takes 50~100ms of reaction time, and the visual processing reaction time is about 200~250ms. This understanding helps robot operators to remotely manipulate robots to perform tasks as if they were on site.
MIT's design engineers estimate that the response time after training should be based on the strategy applied to the operator's hips. The response time after training should be between human proprioception and visual processing; to prove the hips in a non-visual way. The force feedback strategy of the ministry will measure the reference with the hip position. Represents the force input and visual input felt by the human body at the hip.
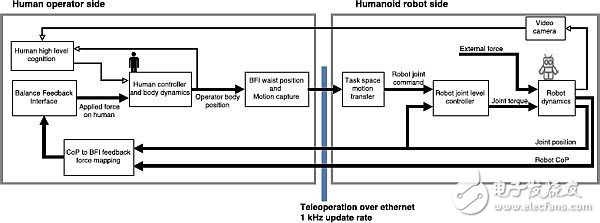
The HERMES system and the human operator's feedback loop diagram, the operator uses the non-visual force feedback of the waist to stabilize the robot in the balanced feedback loop (thick line arrow); the thin line arrow indicates the visual data and the higher level perception planning. Feedback path. (Source: Reference Data 3)
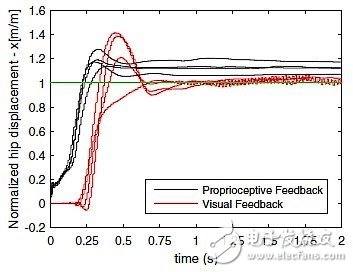
The picture shows human hip displacement from the hip body sensory stimulation force and the visual stimulation ladder input signal. (Source: Reference Data 3)
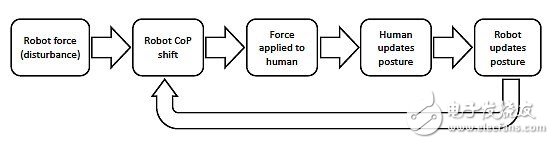
The event delivery process of the human-robot balanced feedback loop. (Source: Reference Data 3)
Pvc Bar Mat,Pvc Bar Spill Mat,Logo Bar Mat,Pvc Barmat
Cixi Mingsheng Rubber & Plastic Co.,Ltd. , https://www.cixidoormats.com